3D object detection from arbitrary rigs of RGB-only cameras
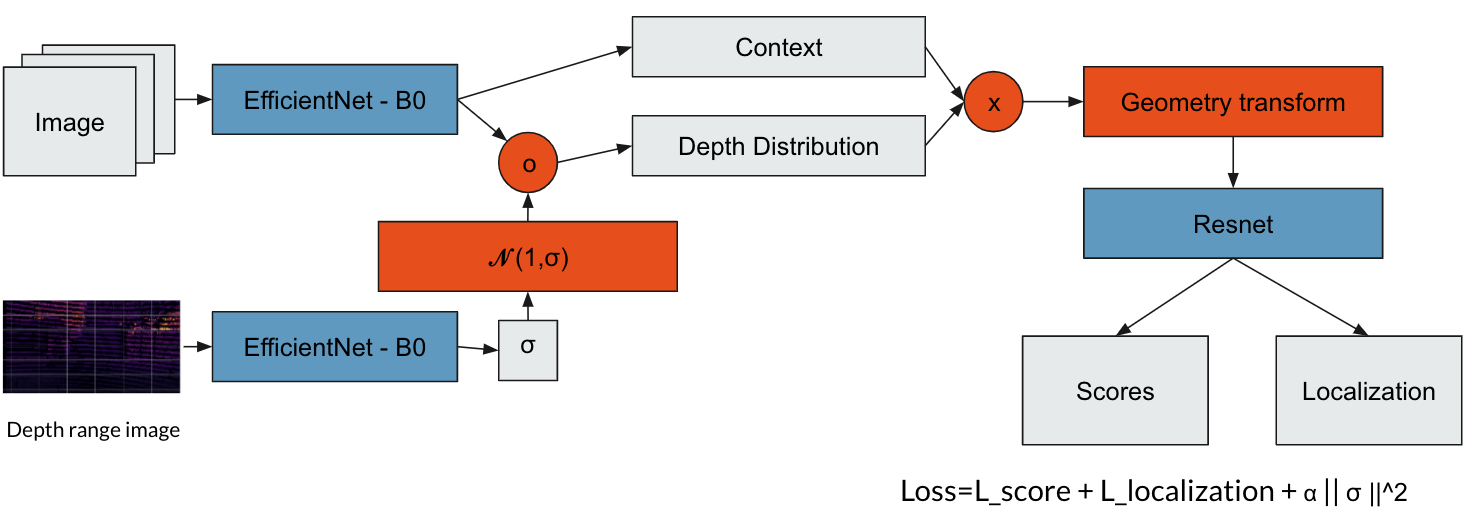
We develop an RGB-only network to perform 3D object detection, and then try to improve the performance by using LiDAR only during training.
Our approach: 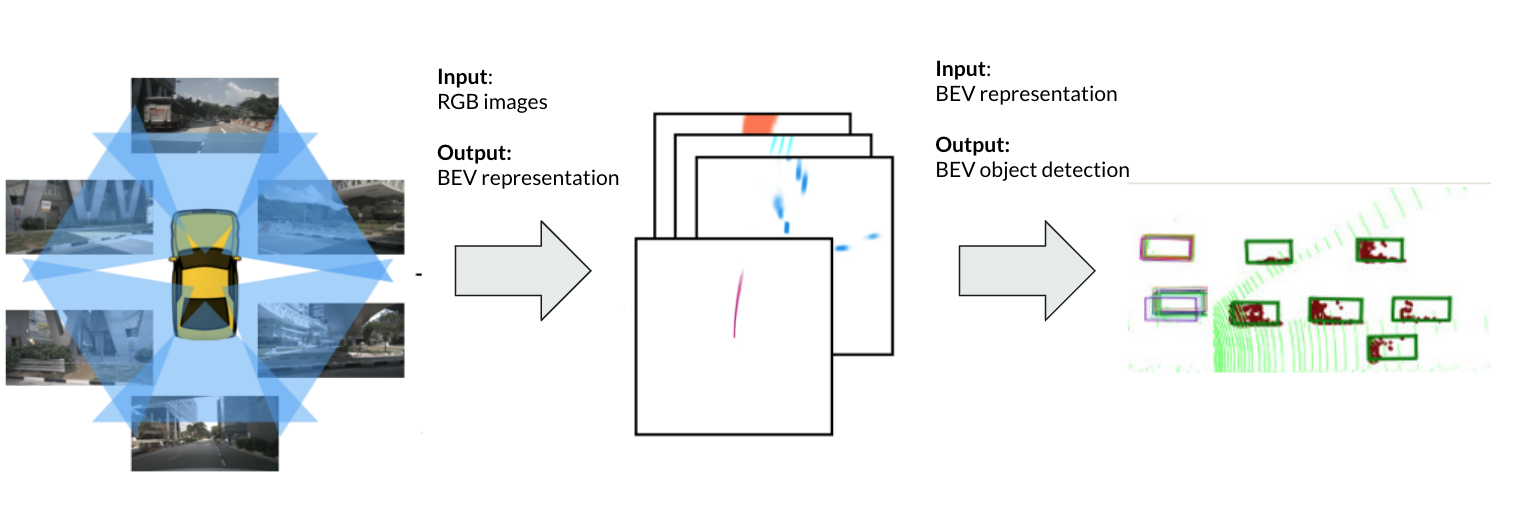

We develop an RGB-only network to perform 3D object detection, and then try to improve the performance by using LiDAR only during training.
Our approach: